
"Bridging the gap between science and industry.
Making complex technology work."
— Cock Heemskerk, CEO
Read more about usOur Expertise


Featured Content
Latest News
View News Archive-

HIT Receives ISO 9001 Certification
On 26 September 2023 HIT was audited on certification for ISO 9001 for engineering consultancy.
-
HIT Presents Research Findings of Orbital Head-Mounted Display: A Novel Interface for Viewpoint Control at IROS 2023
Our research paper was accepted for publication in the 2023 IEEE/RSJ International Conference on Intelligent Robots and ...
-
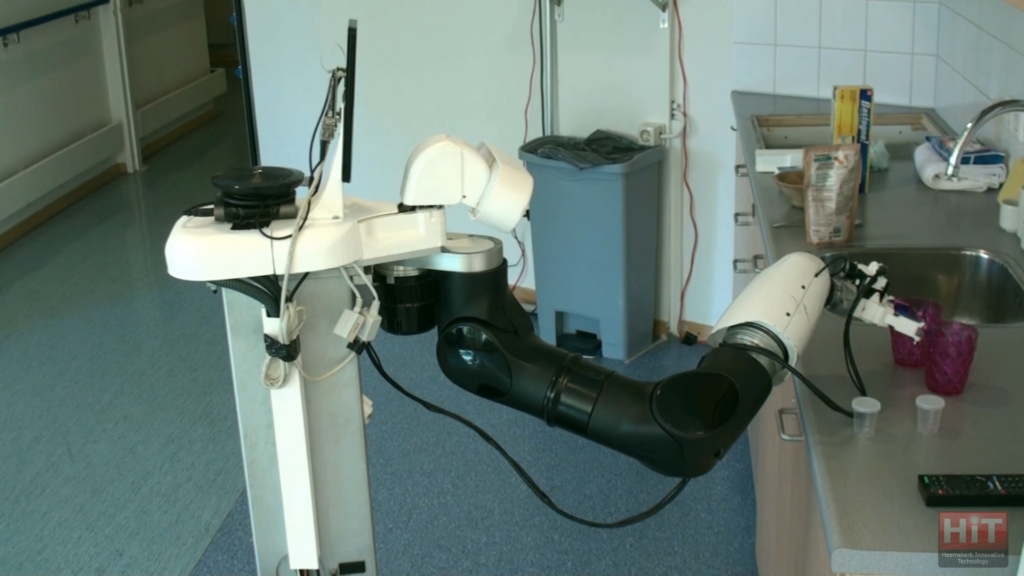
Visit to Badalona Serveis Assistencials to Test Robot Rose
Last month we visited Badalona Serveis Assistencials (BSA) to test Robot Rose!